Soft Actuator Testing Rig
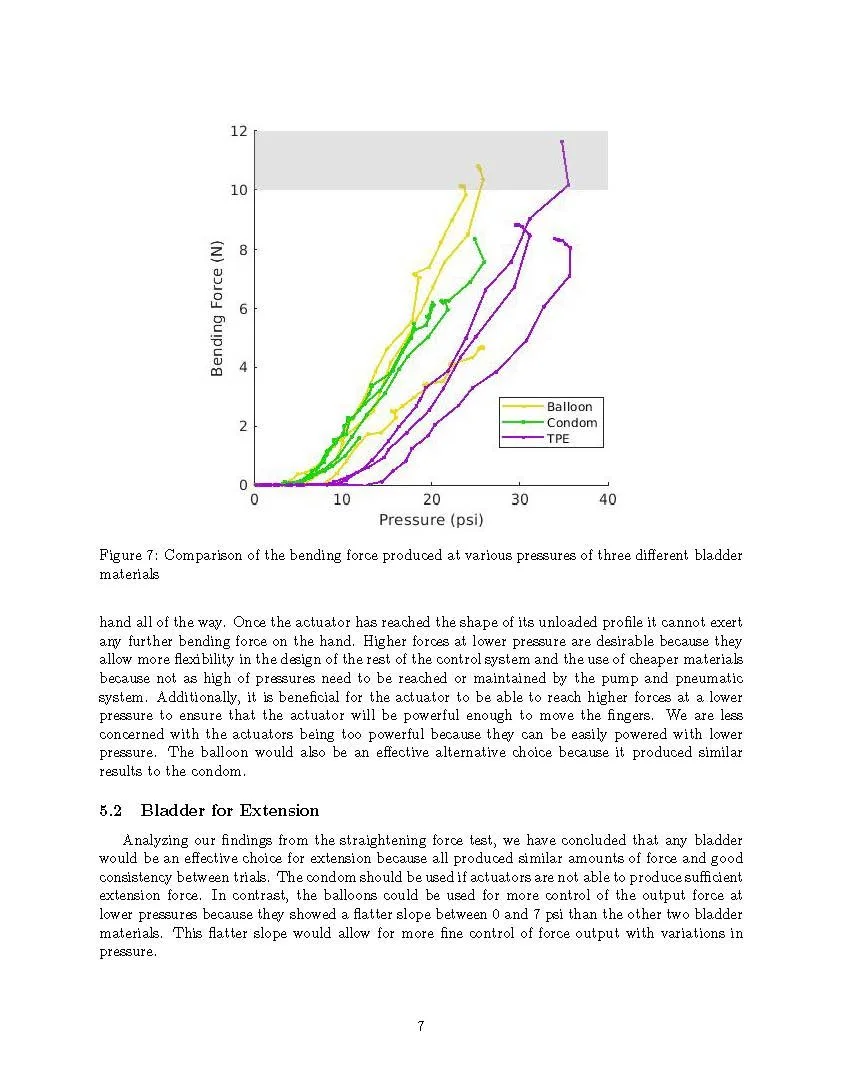
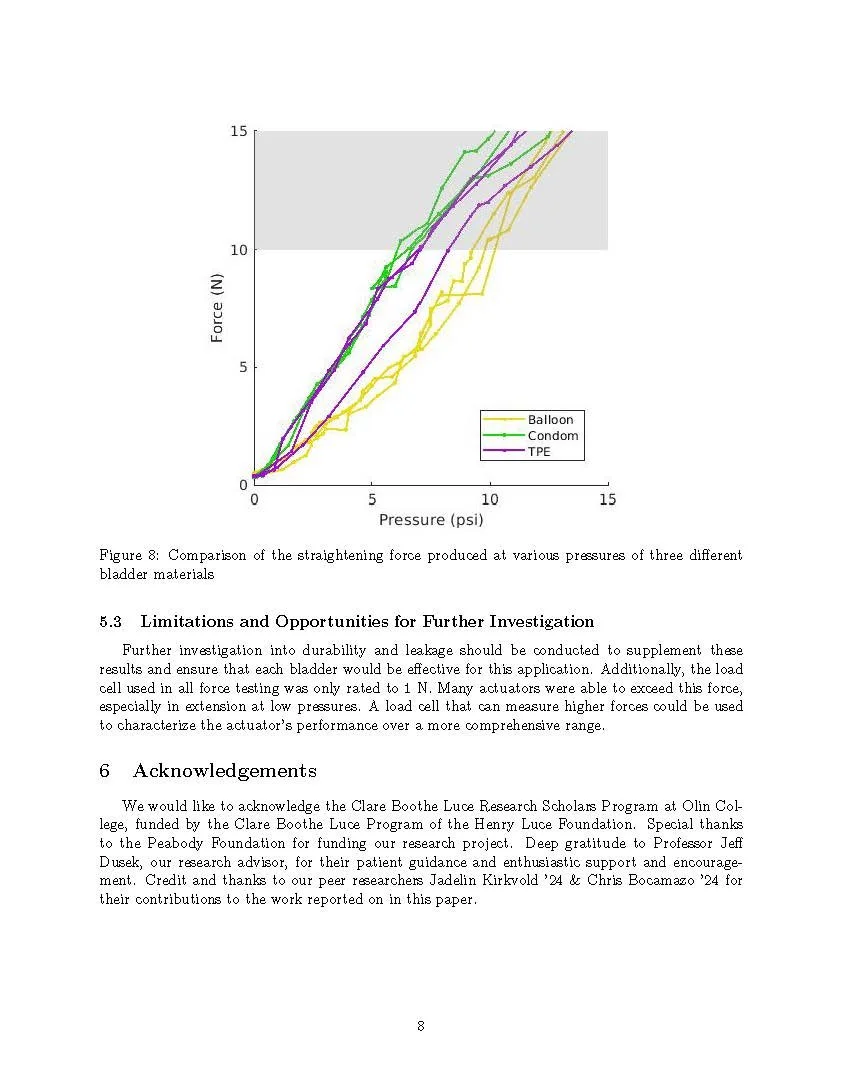
We designed and executed tests to quantify the forces pneumatic fabric based actuators were able to supply. We build rigs to test the straightening force the actuator could create, the bending force it could exert and the bent profile it would form when unrestrained. This data enabled us to make informed design decisions about what badder material to use for the actuators to get the best performance for a physical therapy glove.



Report Preview